让不懂建站的用户快速建站,让会建站的提高建站效率!

当机器东谈主不再是冰冷坚忍的金属外壳,而是能像生物相同生动变形、感知环境,以致自主粉饰崎岖 —— 这不是科幻电影场景,而是上海交通大学等团队最新发表在《Science Advances》上的科研突破!
这款分量仅 120g 的软机器东谈主,通过多材料 3D 打印时候达成了启动、传感、通讯功能的无缝集成,既能被手指手势纳闷操控,又能颓落穿越迷宫,为搜救探伤、工业巡检等复杂场景提供了全新管理决议。
*本文只作念阅读条记共享*
一、崎岖行业痛点:软机器东谈主的 "集成 + 制造" 双重改换
传统软机器东谈主研发恒久受两浩劫题制约:一是刚性电子元件与柔性内容 "势不两存",集成后易出现应力断裂、信号失效;二是复杂结构制造低效,模塑、拼装等设施不仅耗时,还难以达成多材料精确交融。
本征询给出了颠覆性管理决议:
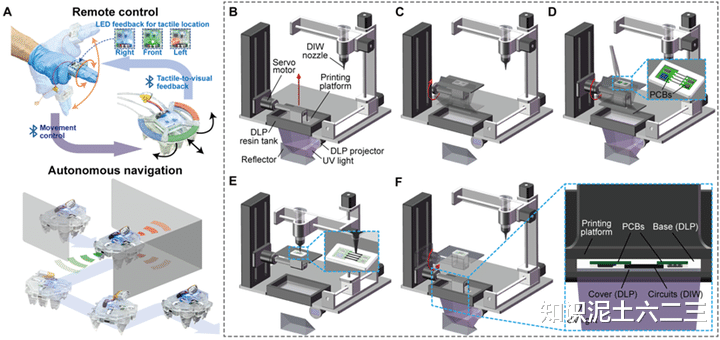
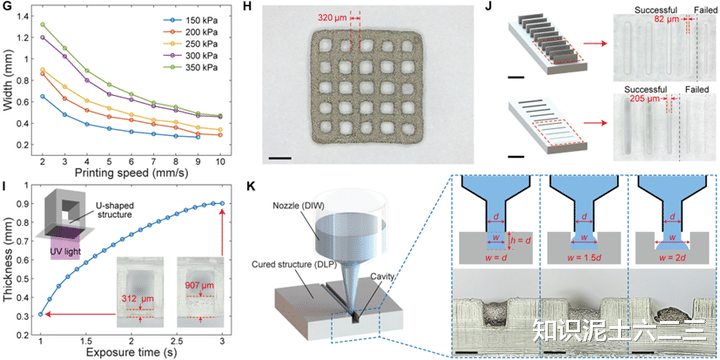
一体化 3D 打印时候:创新友融数字光处理(DLP)与奏凯墨水书写(DIW)时候,DLP 暴露打造精度达 50μm 的复杂柔性基体,DIW 精确千里积导电、电阻型硅胶等功能材料,30 分钟即可完成从基体到电路的全历程打印,无需后续拼装。
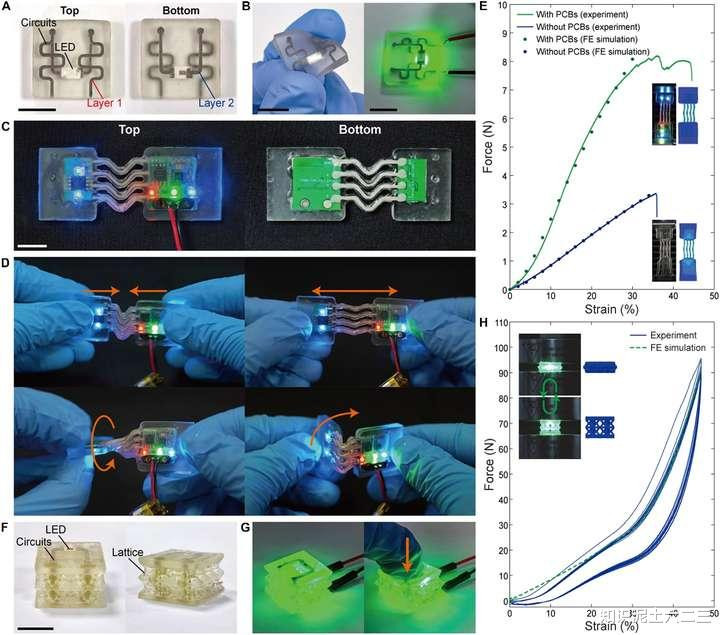
抗变形结构想象:通过晶格超材料、波澜形互连件和闹翻化 PCB 三大想象,让机器东谈主在拉伸、压缩、扭转等大变形下仍保捏机电褂讪。闹翻化 PCB 减少应力连结,波澜形电路升迁柔性,晶格结构可缓冲冲击,即使承受 40% 应变,内置 LED 电路仍能平常发光。
二、硬核功能拆解:小小机器东谈主的 "超智力"
这款软机器东谈主虽体型工致,却集王人了多项中枢手段,实用性拉满:
多模态畅通:生动走位无压力 软现实器摄取 2 行 3 列的足部想象,每个足部是厚度分袂称的三角形结构(左壁 1.1mm、右壁 0.8mm),通过颓落规则 3 个气动通谈的负压信号,可达成前进、后退、独揽转向等畅通。当施加 - 62kPa 负压时,足部盘曲角度可达 45°,通过调控通谈启动时序,机器东谈主能在平边幅田移动。
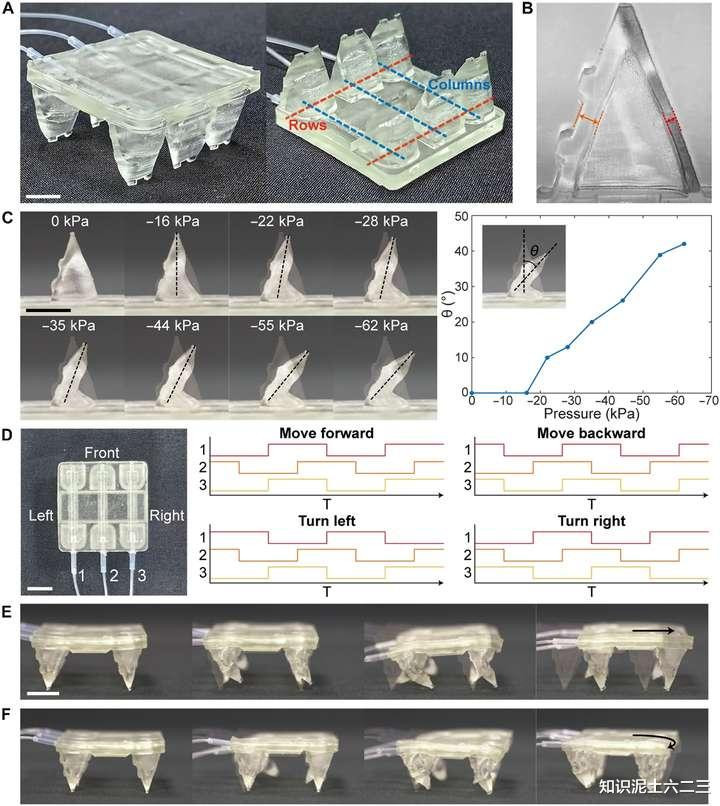
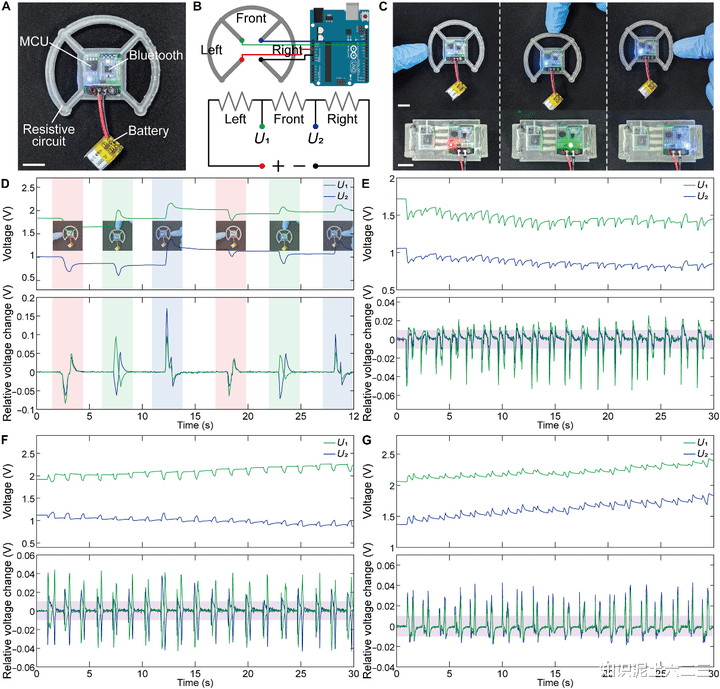
触觉 - 视觉反馈:碰一碰就 "言语" 想象 3/4 环形软传感器,通过 DIW 打印的电阻型硅胶构建传感电路,将传感器分为左、前、右三个检测区域。当某区域受到触碰时,电阻变化会改换为电压信号,经蓝牙模块传输至规则器,触发对应颜料的 LED 辅导 —— 红色代表左侧触碰、绿色代表前线触碰、蓝色代表右侧触碰。经过 20 次轮回变形测试,传感器反映褂讪,阈值精度可达 ±0.01V。
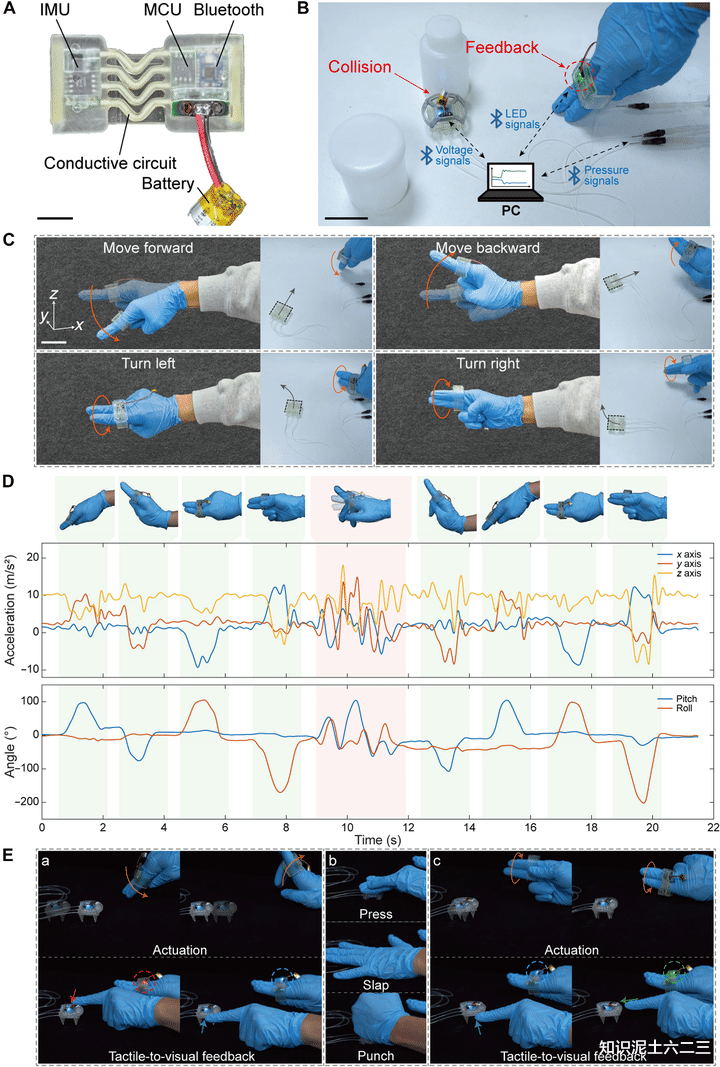
手势遥控:指尖操控黑科技 研发手指佩带式遥控器,内置惯性测量单位(IMU),用户通过手指凹凸移动、旋转等手势即可纳闷操控机器东谈主畅通。遥控器的拉伸联贯器让手指盘曲、分离时仍能褂讪传输信号,操作当然无敛迹。更蛮横的是,即使机器东谈主碰到按压、拍打、撞击等外力冲击,其畅通功能与反馈系统仍能平常责任。
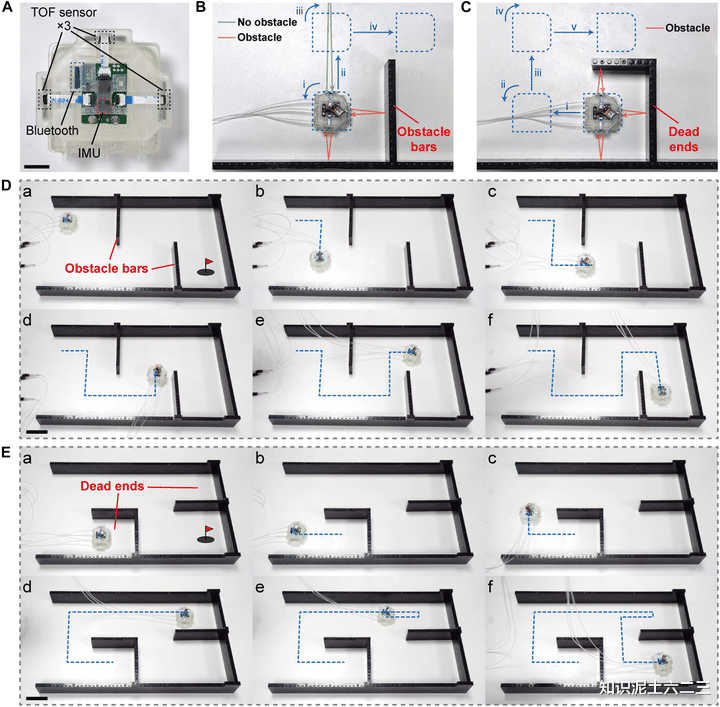
自主避障:迷宫探险不迷途
机器东谈主搭载定制化微型 PCB,集成蓝牙模块、IMU 和 3 个遨游时辰(TOF)传感器,可及时监测周围环境距离(阈值 60mm)。在 S 形迷宫和死巷子场景中,机器东谈主能通过 IMU 跟踪航向,联接 TOF 传感器数据自主策画旅途,完成转向、倒退、绕行等作为,无需东谈主工侵略即可抵达研究位置。
三、时候细节揭秘:材料与工艺的精确把控
这款软机器东谈主的收效,离不开对材料和工艺的极致追求:
柔性基体摄取 TangoPlus 与 EAA 按 6:4 比例搀和的 TEAA 树脂,兼顾柔性与结构褂讪性;
导电电路选择导电硅胶(K867,电导率 90S/cm),传感电路摄取电阻型硅胶(K868,电导率 26S/cm),通过 DIW 时候精确千里积于 DLP 预留通谈中;
为管理 DLP 与 DIW 工艺的兼容性问题,引入气刀打消残留树脂,确保导电硅胶与 PCB 焊盘的可靠联贯,当预留通谈宽度与 DIW 喷嘴直径匹配时,可达成透顶填充。
四、明天可期:从实验室走向更多场景
该征询建议的想象与制造框架,不仅突破了传统软机器东谈主的集成与制造截止,更拓展了其讹诈范畴。明天,通过优化 DLP 投影面积可达成更大尺寸机器东谈主的制造,而柔性 PCB 的替代使用、内置微型泵的集成等校正,将进一步升迁机器东谈主的生动性与续航智力。
这款集自主畅通、触觉感知、无线通讯于一体的软机器东谈主,有望在搜救探伤、工业巡检、东谈主机交互等规模暴露过失作用。跟着多材料 3D 打印时候的捏续迭代,软机器东谈主将朝着更袖珍化、智能化、多功能化的标的发展,为更多复杂场景提供创新管理决议!
参考文件:
Zixiao Zhu et al. Multimaterial 3D printed soft robots with embedded actuation and sensing. Sci. Adv.11, eadz2928(2025).